Product
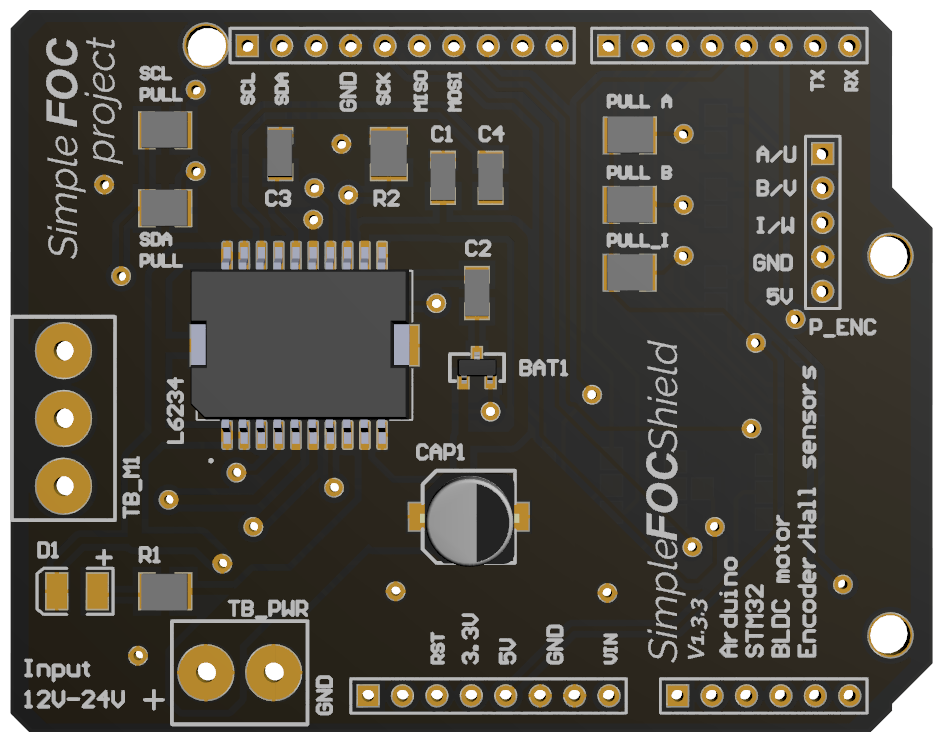
SimpleFOCShield V1.3.3
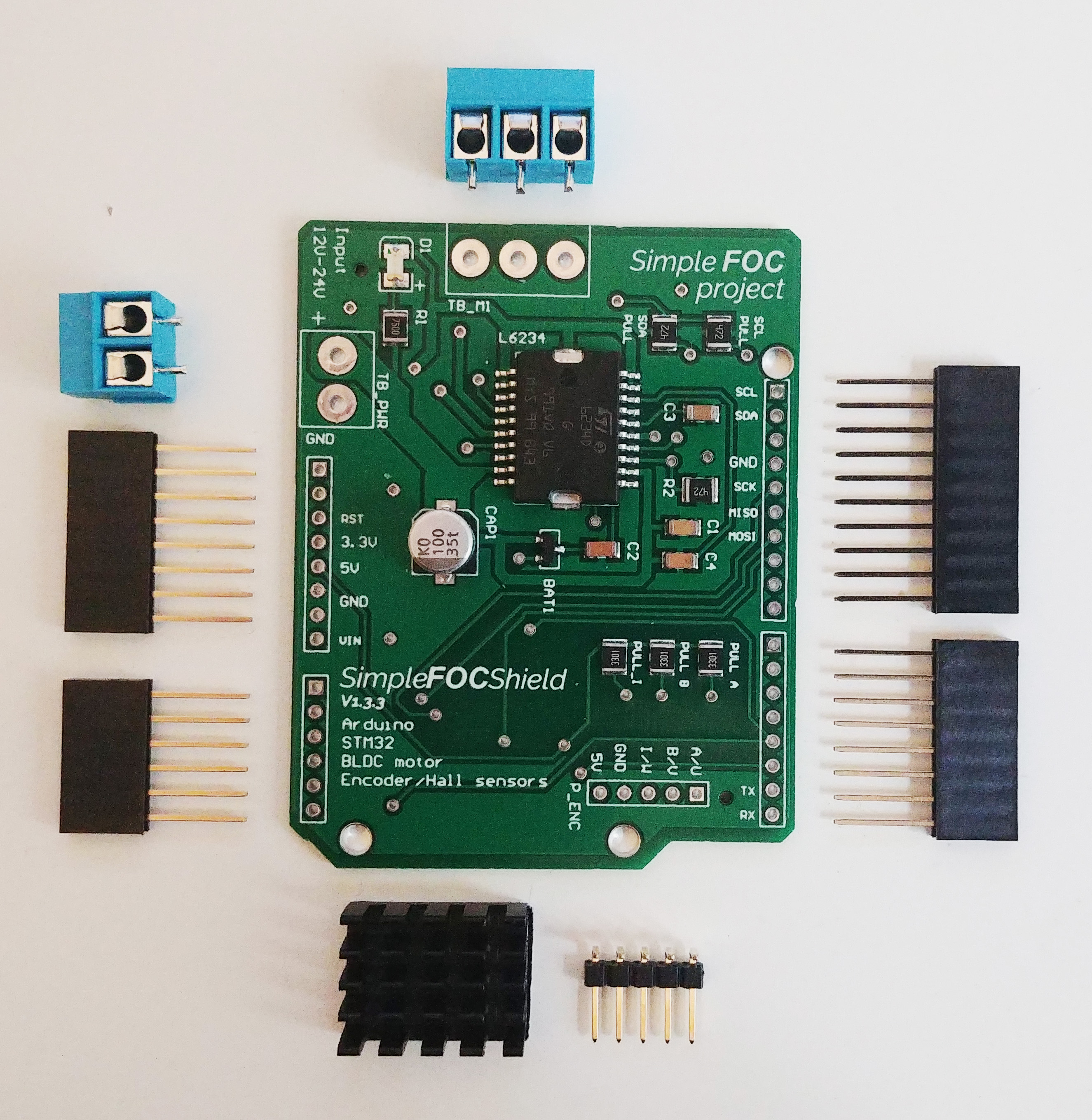

Arduino SimpleFOCShiled is a low-cost, modular and user-friendly alternative for running gimbal BLDC motors with FOC algorithm.
Motivation
BLDC motors and especially gimbal motors can be used as a high quality replacement for the regular hobby motors, such as DC servos and stepper motors. FOC controlled gimbal motors enable high precision positioning, very smooth operation and highly responsive and dynamical behaviour.
The goal of this board is to provide a bare minimum setup for controlling gimbal motors and enable fast prototyping and full exploitation of their capabilities.
This board in combination with the SimpleFOClibrary will give you a simple and intuitive way to control the BLDC motors' torque (through voltage), velocity and position.

Features
-
Plug & play
Using SimpleFOClibrary and any gimbal motor. -
Stackable
Stackable 2 shields (2 BLDC motors + 2 position sensors) -
Configurable pinout
Customise the pins used by the board. -
Encoder Pull-Ups
Integrated configurable 3KOhm Encoder pull-ups
-
I2C communication Pull-Ups
Integrated configurable 4.7KOhm SDA/SCL pull-ups -
Open-Source
Schematics and fabrication files fully available on github. -
Arduino Headers
Compatible for stacking: Arduino UNO (MEGA and similar) and stm32 Nucleo -
Max Power 120W
Max current 5A, Power supply 12-24V.
-
No current sensing!
This board does not integrate any form of current sensing!
SimpleFOCShield v1 supports the voltage based torque control that is not based on the current measurement - read more in our docs.
SimpleFOClibrary is capable of estimating overall current passing through the motor, given proper motor parameters. This value can later be used to control estimated torque of the motor and/or limit the estimated current.
If your application requires precise current control please check out the SimpleFOCShield v2.
Good news is that most of gimbal and other low-power BLDC motors do not require current sensing to exploit their full potential.
-
BEWARE 📢 : SimpleFOCShield is designed for gimbal motors
SimpleFOCShield has been designed for gimbals motors with internal resistance around 10 Ohms. Using this board with high-power drone motors may burn the L6234 chip integrated on the board. The chip can handle up to 5Amps of current for short periods of time, but in for long-term operation (without the heat-sink) the current should stay under 2 Amps.
- It is possible to use this board with low resistance motors but it requires a bit of experience and it is not recommended for beginners. Ask community about it!
What can I do with this board?
Possible applications range all the way from simply substituting a servo motor in your project, over the high precision motion control of camera gimbals all the way to the highly dynamical applications such as robotics.
This board can also be a cool platform for student projects, to make experiments such as ball and plate, inverted pendulums, segways, inertia wheels and similar. These setups are usually very expensive and hard to calibrate and design.
Project examples
Reaction Wheel Inverted Pendulum
This is a project of designing and controlling the reaction wheel inverted pendulum based entirely on Arduino SimpleFOClibrary and SimpleFOCShield .
- Arduino UNO using SimpleFOClibrary and SimpleFOCShield
- All CAD designs available for modification and STL files provided
- State-space LQR controller
- Very simple to assemble, configure and setup.
Documentation
The aim of the SimpleFOClibrary and SimpleFOCShiled is to demystify the FOC algorithm and to provide the community a simple way to use this powerful algorithm in their projects. Therefore this board is completely open source and fully documented. If you are interested in manufacturing this board on your own, make sure to check the board fabrication documentation section. Don't hesitate to contact me if you have any suggestions or need any more details about the board!,